Understanding Structural Dynamics and Inertia
![[object Object]](/_next/image?url=%2Fimages%2Fauthors%2Fsean_carroll.png&w=256&q=75)
By the end of this post you should clearly understand when and why a dynamic analysis is performed instead of a (usually more straightforward) static analysis. Clearly understanding structural dynamics and the difference between static and dynamic analysis really is essential before you can move on to understand dynamic analysis techniques.
When we study engineering (civil, structural, mechanical etc.), the great majority of our time is spent getting to grips with static analysis. As a result most engineers will be very comfortable when things are stationary, but once a problem ‘becomes dynamic’ and things start moving – many engineers start to get jumpy! This isn’t really surprising, most of the loads we deal with in general day-to-day civil/structural engineering can be considered static loads, e.g. typical permanent and variable loads. It’s worth nothing that mechanical engineers tend to have a higher comfort level with structural dynamics. This is hardly surprising given the nature of mechanical engineering.
🎓 If you want to learn more about Structural Dynamics, check out my course on the Fundamentals of Engineering Structural Dynamics with Python.
Fundamentals of Engineering Structural Dynamics with Python
Leverage fundamental structural dynamics to build your own flexible numerical solutions in Python.
After completing this course...
- You’ll understand how to model dynamic behaviour using spring-mass-damper models and how to simulate free vibration behaviour.
- You’ll be able to model the influence of harmonic loading and how to characterise the transient and steady-state responses.
- You’ll be able to use Python to implement the Piecewise Exact Method to model any form of general dynamic loading.
1.0 Introduction
Let’s start off by considering a static load or force. A static load has two important characteristics that distinguish it from a dynamic load:
- The magnitude of a static load does not vary with time
- For a load to be considered static, it must be applied ‘slowly’. We’ll discuss this in more detail below.
A quick aside here: The term ‘variable load’ above is used here in the Eurocode context, i.e. it describes loads that do have the potential to vary with time, e.g. loading due to occupancy in a building, but this is not considered a dynamic load in the context of this discussion as the rate of change of the load magnitude can be considered low. What we mean by this will become clearer as we proceed.
If a load applied to a structure qualifies and can be considered a static load, we can expect a static structural response, i.e. for a given load magnitude, we observe a single structural response (deflection). The deflection of the structure will be governed by the load magnitude, and the stiffness of the structure according to the standard relationship:
💡 A static force will induce a single static structural response, i.e. deflection. In other words for every load magnitude we have a corresponding single structural response.
We can illustrate the basic idea of static loading and response by considering the beam below subject to an external force .
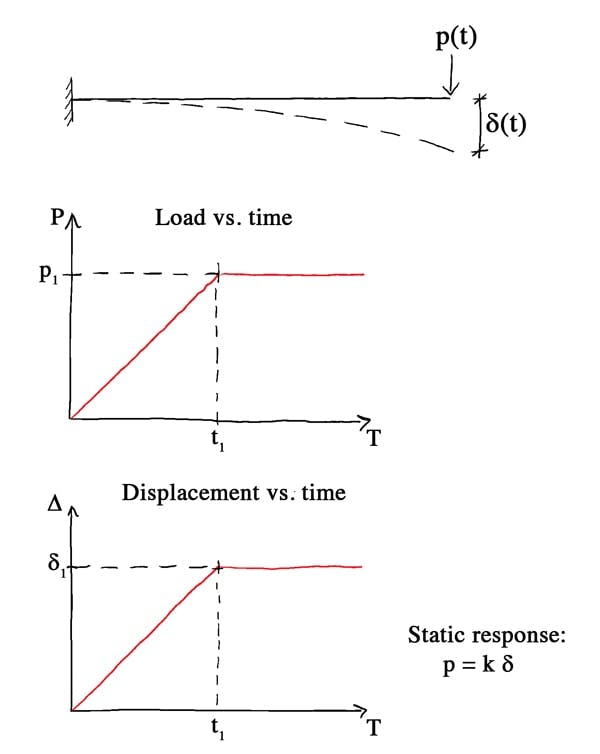
Simple cantilever subject to a slowly applied static load. Every value of load magnitude corresponds to a single value of deflection, governed by the stiffness of the structure.
Notice that although the external force is actually a function of time , the duration of load application is highlighted as being long, i.e. the load is slowly increased in magnitude from zero to its maximum value. This is a classic static structural response that most of us are comfortable with.
2.0 Dynamic versus Static Structural Analysis
Although we said that we typically encounter static loading, dynamic loads occur with sufficient frequency that we need to understand how to assess their influence on a structure. Typical forms of dynamic loading can include loading due to earthquakes, wind, vehicle or pedestrian traffic or wave loading on coastal or offshore structures.
As you might assume from the preceding discussion, a dynamic load has a magnitude that varies as a function of time. It may also be a load that is applied rapidly to a structure. Consider for example the same beam as above, with the same applied load except this time the load is applied more rapidly , notice the different structural response.
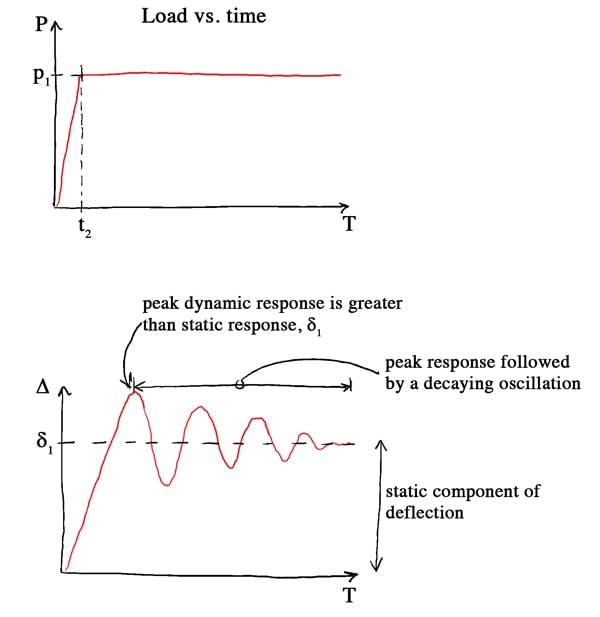
Dynamic response of the cantilever when subject to a rapidly applied load. The response is characterised by a peak followed by a decaying oscillation about the static deflection point.
We can see that when the same load is applied to the cantilever, but faster, we get a very different structural response. We observe a peak dynamic response which is greater than the static deflection. This is then followed by a decaying oscillation or vibration about the static deflection point. This is a classic dynamic response. But the question remains, what is it about the speed of load application that causes this totally different structural behaviour? The answer, in a word is, INERTIA!
2.1 Inertia
In this case the load is applied ‘dynamically’ (quickly) and as a result we observe a dynamic structural response. This response is the result of inertia.
💡 Inertia is a bodies resistance to a change in its velocity. This resistance can be modelled with an inertia force.
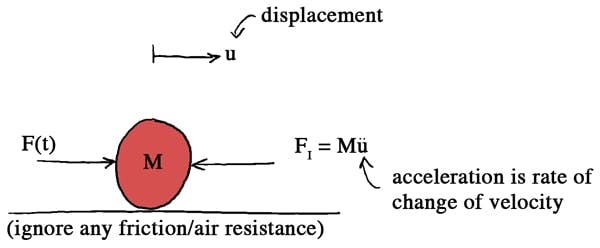
Ball with mass experiencing a disturbing force . The ball’s resistance to a change in its velocity, i.e. its inertia, is modelled with an inertia force .
The role of inertia here can be captured as follows:
- If I want to change the velocity of the mass, , this will give rise to an acceleration (rate of change of velocity). Therefore there will be an inertia force I must overcome if I want to change the velocity of the ball.
- Once the ball is moving, if I remove the external force, , the ball will stay moving with a constant velocity (Newton 1). Therefore the inertia force disappears because there is no change in velocity.
- When the velocity of the ball is constant, it is in a state of dynamic equilibrium. Newton 1 tells us that a mass always wants to maintain either static or dynamic equilibrium. This tendency of a mass to maintain equilibrium (i.e. resist changes in its velocity) can be modelled or by applying an inertia force.
⚠️ It’s important to realise that the inertia force is fictitious; it is not an externally applied force (like ), but it models the behaviour of the mass, i.e. it models the masses resistance to a change in its velocity.
So in summary:
- all mass resists changes in its velocity (mass wants to maintain static or dynamic equilibrium)
- we can model this physical behaviour in our free body diagrams and equations by applying a fictitious inertia force (known as D’Alembert’s Principle)
- the inertia force is proportional to the mass and the rate of change of velocity (acceleration)
2.2 Dynamic Beam Response
Now returning to our beam example; the displacement of the beam depends on two factors:
- the time-varying external force
- the beam’s inertia modelled using a fictitious inertia forces which oppose the accelerations producing them
As the external load is applied quickly or dynamically, the rate of change of velocity of the beam will be high or non-negligible. We now know that this means the beam will exhibit a correspondingly high resistance to a change in its velocity. We model this by applying inertia forces.
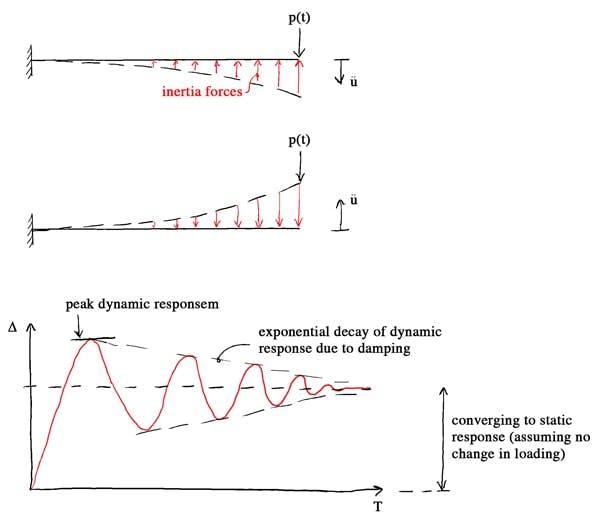
Cantilever beam exhibiting a dynamic response due to the speed of load application and the resulting inertia forces developed along the length of the beam.
Remember the beam deflection now depends on the external force and the relatively large inertia forces induced by the beam’s acceleration. This means that the internal moments and shears in the beam must resist not only the externally applied force but also the inertia forces resulting from accelerations of the beam.
💡 It’s the presence of inertia forces that fundamentally differentiate a dynamic problem from a static problem.
If inertia forces represent a significant portion of the total loading resisted by a structure, a dynamic analysis should be performed as the dynamic characteristics of the problem cannot be ignored and the structural response will vary with time.
Conversely if all external loads are applied slowly such that they do not induce significant inertia forces, the problem can be considered static with a single response corresponding to the externally applied load(s).
Hopefully this short tutorial has given you a sense of why a dynamic analysis may be required rather than a static analysis. Of course, once you know that the dynamic characteristics of a problem can’t be ignored, you still need to carry out some dynamic structural modelling. This is where the ubiquitous single-degree-of-freedom system usually comes in. If you want to continue exploring structural dynamics, take a look at my course on this, Fundamentals of Engineering Structural Dynamics with Python. In this course we’ll cover the fundamental theory but also leverage Python to develop structural dynamics solvers that you can deploy on your own projects (FYI you don’t need to know Python to take this course! 😉).
That’s all for now, see you in the next one.
Dr Seán Carroll's latest courses.


Featured Tutorials and Guides
If you found this tutorial helpful, you might enjoy some of these other tutorials.
How to Calculate Reactions using Free Body Diagrams
How to use free body diagrams to help calculate reaction forces using equilibrium equations

Dr Seán Carroll